激发科创火花,促进成果转化。北航杭州创新研究院始终坚持“创新+转化”双轮驱动, 建设产教研融合的高能级新型研发机构。过去5年,研究院一直致力于高效聚合科技创新资源,实现科技成果转移转化,促进协同创新与融合发展,助力地方经济的高质量发展。
值此研究院成立5周年之际,北航杭州创新研究院微信公众号推出“成果推介”栏目,搭建信息交流的平台,让科研贴近市场需求,使企业获得智力支撑,推动创新链产业链深度融合,打通科技创新的“最初一公里”和科技成果转移转化“最后一公里”。
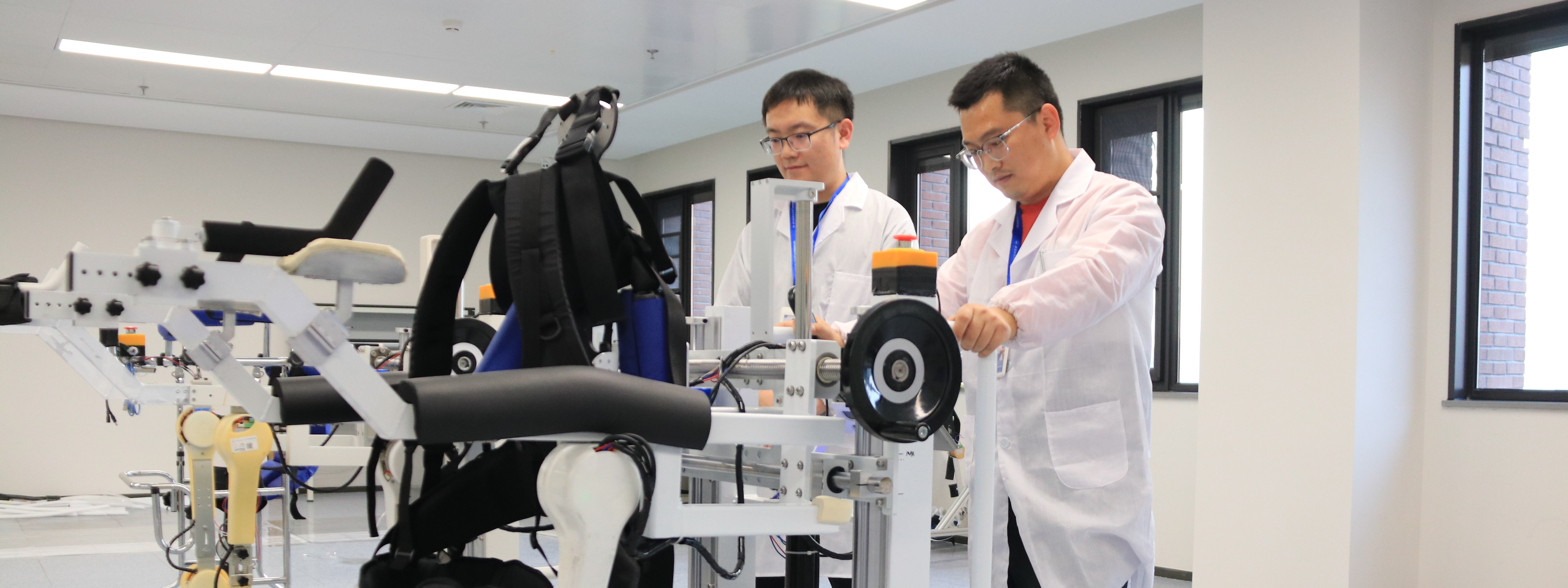
第一期栏目聚焦我院大数据与工业智联网技术研究室,重点推介“多轴机器人运动控制技术的研发及行业解决方案”。
一、成果简要介绍
本团队致力于多轴机器人运动控制技术的研发及行业解决方案的推广和应用。其核心技术包括机器人运动控制、运动学及动力学算法、在线轨迹规划、视觉伺服技术,3D视觉,柔顺控制、多机协作等。目前主要的产品覆盖了工业应用、医疗服务、科研教育等多个领域。
本团队自主研发的机器人通用控制系统,满足串联、并联、工业机械臂、协作机械臂等多种构型、多机械臂协同控制需求。即可用于支持EtherCAT、CANOpen总线通信伺服系统直接驱动,也可驱动第三方机器人,如:ABB、KUKA、UR、xArm、INNFOS、ROKAE等。支持多种运动控制指令,包括:点到点、直线、圆弧、螺旋线、5阶B样条、多项式、动态目标等规划指令。支持多种常用功能,包括:遥操作、力控装配、力控打磨、码垛、拖动示教等。支持多机器人及附加轴组联动,具体多轴组协调运动能力。可以提供稳定可靠,功能丰富的二次开发接口,所具有的硬件抽象层,让合作伙伴只需关注行业需求。利用系统提供的二次开发接口,结合行业经验,就可开发新型自动化装备,如医疗、核能、教育等行业设备。用户可根据自己的设备进行自定义配置。具备多层次二次开发接口,覆盖控制系统的所有功能,满足不同层次的二次开发及定制化需求。
二、成果介绍
1、 所属领域:机器人、高端装备、科研教学
2、 主要应用场景:
机器人码垛、打磨、装配、扫描探伤、3C检测、医疗自动化、康养服务、晶圆半导体及特种机器人等。机器人原理教学、职教培训等。

3、 市场背景及痛点
(1)行业应用
专注机器人应用解决方案,为面向具体应用行业提供自主可控、自由定制的解决方案。解决现有产品开放程度低、定制难度高、货期长等问题。
(2)科研教学
国家的机器人发展产业规划把“加强人才队伍建设”作为机器人产业发展的6大保障措施之一,提出要加强大专院校机器人相关专业学科建设。全国共有187所高校获批“机器人工程”专业建设资格。
以机器人工程专业为代表的新型专业缺乏能够与Matlab/Simlink软件良好配合的教学系统。全国80多所高校已经开设了“机器人工程专业”,类似需求的专业还包括:汽车电子,人工智能,物联网等。众多职业技术学院、学校教学过程中也普遍反馈需要让学生了解基本原理、知其所以然。
4、 产品或技术成果介绍
(1)机器人通用高性能控制器


用于机器人及电机模组的运动控制,满足串联、并联、工业机械臂、协作机械臂等多种构型及多机械臂协同控制需求。支持多种运动控制指令及指令平滑过度与动态调速,包括:点到点、直线、圆弧、螺旋线、样条、多项式、动态目标等。支持多机器人及附加轴组联动,具体多轴组协调运动能力。支持ABB、KUKA、UR、xArm、INNFOS、ROKAE等私有协议机器人控制。支持遥操作、力控装配、力控打磨、码垛、拖动示教等。支持EtherCAT或CanOpen总线伺服直驱,对机器人构型无明确限制,可以是直角坐标、六轴串联、七轴串联等,也可以是复杂的拟人机器人。同时还支持无法实现伺服直接驱动的商用机器人的驱动控制。支持同时控制多个机器人,并可实现多机器人独立或同时控制。能够用于完成多臂协调工作任务。通过配置文件对伺服驱动设备进行分组并配置相应机器人参数,即可实现多机器人同时控制。支持多附加轴组,且不限定附加轴数目。附加轴组可单独控制也可与机器人联动及同步控制。通过配置文件可以实现附加轴配置及与机器人的关联,可以同时关联多个机器人。支持多个品牌设备,并提供统一操作接口。并可根据用户需要快速提供适配支持。通过配置文件即可快速实现外设配置。
(2)机器人C/C++二次开发接口
可以快速搭建机器人研究或应用平台,支持机器人控制算法验证及机器人应用的快速开发,满足用户二次开发需求。提供了用于二次开发的SDK,主要包括控制系统运行必须的动态连接库、接口头文件。开放控制器权限,支持控制器内部署和运行用户的算法或功能程序。提供二次开发工程及demo程序和开发服务支持。允许控制器内直接开放和运行。全自主开发,依赖库少,便于用户环境封装和集成。提供多类功能接口,用户可以利用这些功能接口编写应用程序,也可以利用SDK进行二次开发使用。接口简单,上手快,便于开发和使用。
(3)机器人控制系统实验平台


以工业/协作、六轴/七轴、单臂/双臂机器人为研究对象,机器人控制算法为核心,结合外部传感设备,开展机器人轨迹规划、力控制等算法实验研究。具有视觉、力觉等多种传感器,可开展位置跟踪、阻抗控制等多种算法实验验证。在Simulink环境下建立机器人控制算法模型,实现算法快速真机验证。提供通信接口,无需关心设备通信,专注算法研究。调试方便,支持参数在线修改、保存与分析。
5、 核心优势: 技术、 产品、 解决方案及其他方面
高度开放、自主可控,专注机器人行业解决方案,为企业机器人相关产品研发提供可靠的底层技术支持,加快企业产品研发进度。
6、 技术成熟度及应用情况
本产品具有成熟的体系架构和产品形态,具有可靠性高、性能好的特点。目前已跟机器人相关企业、高校及科研院所建立长期合作关系。
三、 团队介绍
1、 团队负责人
牛建伟,北航首批长聘教授,美国卡内基梅隆大学计算机学院访问学者,科技部重点研发计划项目负责人,入选教育部“新世纪优秀人才支持计划”,获教育部技术发明一等奖和北京市教学成果一等奖,获宝钢优秀教师奖,获国家863计划创新之星称号,主持了国家重点研发计划“机器人操作系统开发环境研究与应用验证”、国家973课题“核电站紧急救灾机器人的基础科学问题”、浙江省重点研发计划“新一代高性能工业机器人控制器关键技术研发及产业化”等国家级和省部级科研项目30多项,研发了一套全国产工业机器人操作系统及其集成开发环境,并在新松、埃夫特、珞石、大族、启帆等多家国产机器人龙头企业的产品中进行了应用验证,已销售1000多套。担任了中国软件行业协会嵌入式系统分会理事、IEEE IES工业应用的云和无线系统技术委员会中国区副主席,国家基金委优青会评专家,任多个国际顶级会议TPC成员和知名期刊编委,在国内外重要期刊和会议上发表论文200多篇(包括CCF A类论文30多篇),ESI高被引论文6篇,h指数57,SCI引用5100余次,谷歌引用13000余次,获JNCA、IEEE PerCom、IEEE ICC、IEEE WCN等10余篇最佳论文,出版学术著作2部,已授权发明专利60余项。
2、核心团队
中心依托软件工程和计算机科学与技术两个国家一级重点学科以及软件开发环境国家重点实验室,面向工业互联网新基建领域,聚焦以认知科学和人工智能为核心的智能工业系统(简称“工业脑”),基于数据科学、智能科学和知识科学开展智能工业原理、技术和系统的研究和创新。中心拥有国家级科研团队,在大数据计算理论、大数据处理技术、智能操作系统等方向已获得了诸多突破;研究的大数据分布式资源管理与可靠性保障技术,已成功应用于阿里云飞天调度系统,具有单集群万节点规模的高可用性和扩展能力,获2017电子学会科技进步特等奖;研究的面向智能驾驶的车联网智能操作系统,已应用于神州租车实时数据管理和监控,并荣获国家科技进步二等奖;研制的GRAPE和BEAS两套大数据计算引擎,其核心技术已在华为技术有限公司MPPDB以及大数据平台查询优化器的技术原型系统中实践应用;这些研究成果为开展“工业脑”的创新研究和技术突破,提供了坚实基础,形成了国内特色优势。团队现有中科院院士及欧洲科学院院士2名,长江杰青12人。
四、 合作方式
1、 合作需求:希望提供应用示范场景,以项目形式建立合作,进一步推动成果产业化落地。在一定研发基础上共同成立公司,联合推广产品,实现产品的售前、生产、销售及售后等各环节工作。
2、 合作方式:包括提供应用示范场景及项目、资金支持、联合研发等。
如有合作意向,
请联系北航杭州创新研究院概念验证中心
电话: 0571-88265056
邮箱:lynnvivia04019@163.com